#include <movement.h>
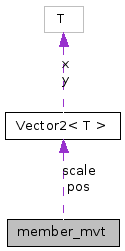
Collaboration diagram for member_mvt:
Public Member Functions | |
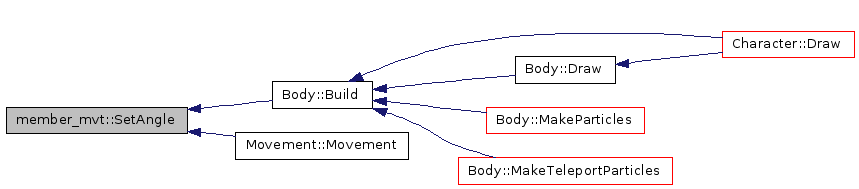
| void | SetAngle (double angle) |
| const double & | GetAngle () |
| member_mvt () | |
Public Attributes | |
| Point2f | pos |
| Point2f | scale |
| float | alpha |
| bool | follow_crosshair |
| bool | follow_half_crosshair |
| bool | follow_speed |
| bool | follow_direction |
Private Attributes | |
| double | angle_rad |
Definition at line 29 of file movement.h.
| member_mvt::member_mvt | ( | ) | [inline] |
Definition at line 51 of file movement.h.
00051 { pos.x = pos.y = angle_rad = follow_crosshair = follow_half_crosshair 00052 = follow_speed = follow_direction = 0; 00053 alpha = scale.x = scale.y = 1.0;};
| const double& member_mvt::GetAngle | ( | ) | [inline] |
| void member_mvt::SetAngle | ( | double | angle | ) | [inline] |
| float member_mvt::alpha |
Definition at line 46 of file movement.h.
double member_mvt::angle_rad [private] |
Definition at line 31 of file movement.h.
Definition at line 47 of file movement.h.
Definition at line 50 of file movement.h.
Definition at line 48 of file movement.h.
Definition at line 49 of file movement.h.
Definition at line 33 of file movement.h.
Definition at line 34 of file movement.h.
 1.4.7
1.4.7