#include <eSensor.h>

Public Member Functions | |
| tCHECKED_PTR_CONST (eHalfEdge) ehit | |
| eSensor (eGameObject *o, const eCoord &start, const eCoord &d) | |
| virtual void | PassEdge (const eWall *w, REAL time, REAL, int=1) |
| void | detect (REAL range) |
| void | SetCurrentFace (eFace *f) |
| eSensor & | SetInverseSpeed (REAL inverseSpeed) |
| Sets the inverse speed of the sensor. | |
| REAL | GetInverseSpeed (void) const |
| Gets the inverse speed of the sensor. | |
| eSensor const & | GetInverseSpeed (REAL &inverseSpeed) const |
| Gets the inverse speed of the sensor. | |
Public Attributes | |
| REAL | hit |
| int | lr |
| eCoord | before_hit |
Protected Member Functions | |
| tCHECKED_PTR (eGameObject) owned | |
Private Attributes | |
| REAL | inverseSpeed_ |
Definition at line 39 of file eSensor.h.
| eSensor::eSensor | ( | eGameObject * | o, | |
| const eCoord & | start, | |||
| const eCoord & | d | |||
| ) |
Definition at line 37 of file eSensor.cpp.
References eGameObject::currentFace, NULL, and eGameObject::pos.
00038 :eStackGameObject(o->grid, start,d,o->currentFace) 00039 ,hit(1000),ehit(NULL),lr(0), owned(o) , inverseSpeed_(0) 00040 { 00041 if (owned) 00042 { 00043 currentFace=owned->currentFace; 00044 00045 // find a better current face if our start postion is not really at the 00046 // current position of the owner 00047 if ( grid && !currentFace || !currentFace->IsInside( pos ) && currentFace->IsInside( owned->pos ) ) 00048 { 00049 currentFace = o->grid->FindSurroundingFace( pos, currentFace ); 00050 } 00051 } 00052 else 00053 currentFace=NULL; 00054 }
| eSensor::tCHECKED_PTR_CONST | ( | eHalfEdge | ) |
Reimplemented from eGameObject.
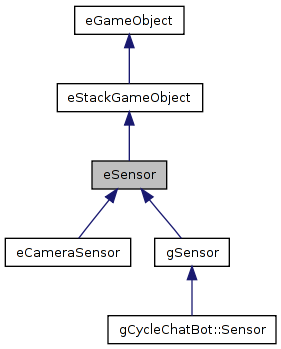
Reimplemented in eCameraSensor, gCycleChatBot::Sensor, and gSensor.
Definition at line 56 of file eSensor.cpp.
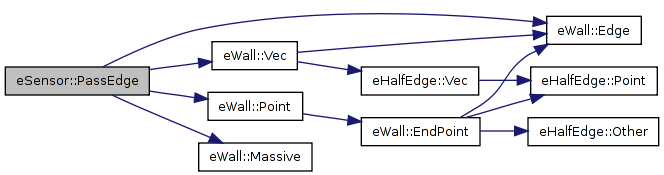
References before_hit, eGameObject::dir, eCoord, eWall::Edge(), hit, inverseSpeed_, lr, eWall::Massive(), eWall::Point(), REAL, and eWall::Vec().
Referenced by gSensor::PassEdge().
00056 { 00057 if (!w->Massive()){ 00058 return; 00059 } 00060 00061 // extrapolate the hit time 00062 REAL hitTime = owned->LastTime() + time * inverseSpeed_; 00063 00064 if (owned && !owned->EdgeIsDangerous(w, hitTime, a)) 00065 return; 00066 00067 lr=0; 00068 00069 const eHalfEdge *e = w->Edge(); 00070 00071 eCoord eEdge_dir=w->Vec(); 00072 eCoord collPos = w->Point( a ); 00073 00074 // con << dir << eEdge_dir << '\n'; 00075 REAL dec=- eEdge_dir*dir; 00076 00077 if (dec>0) 00078 lr=1; 00079 else if (dec<0) 00080 lr=-1; 00081 else 00082 lr=0; 00083 00084 hit=time; 00085 ehit=e; 00086 before_hit=collPos-dir*.000001; 00087 00088 throw eSensorFinished(); 00089 }

| void eSensor::detect | ( | REAL | range | ) |
Definition at line 95 of file eSensor.cpp.
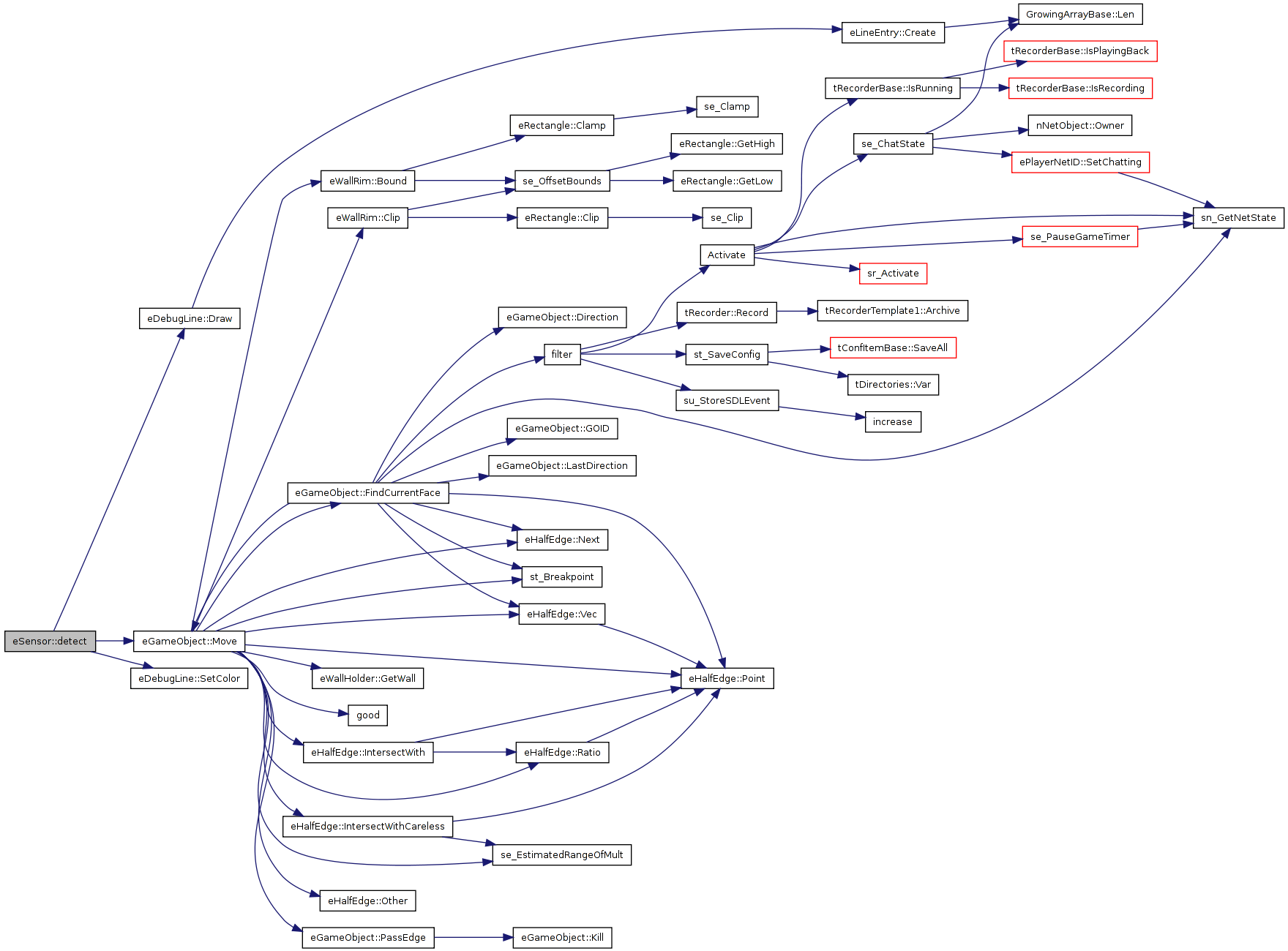
References before_hit, eGameObject::dir, eDebugLine::Draw(), hit, eGameObject::Move(), eGameObject::pos, and eDebugLine::SetColor().
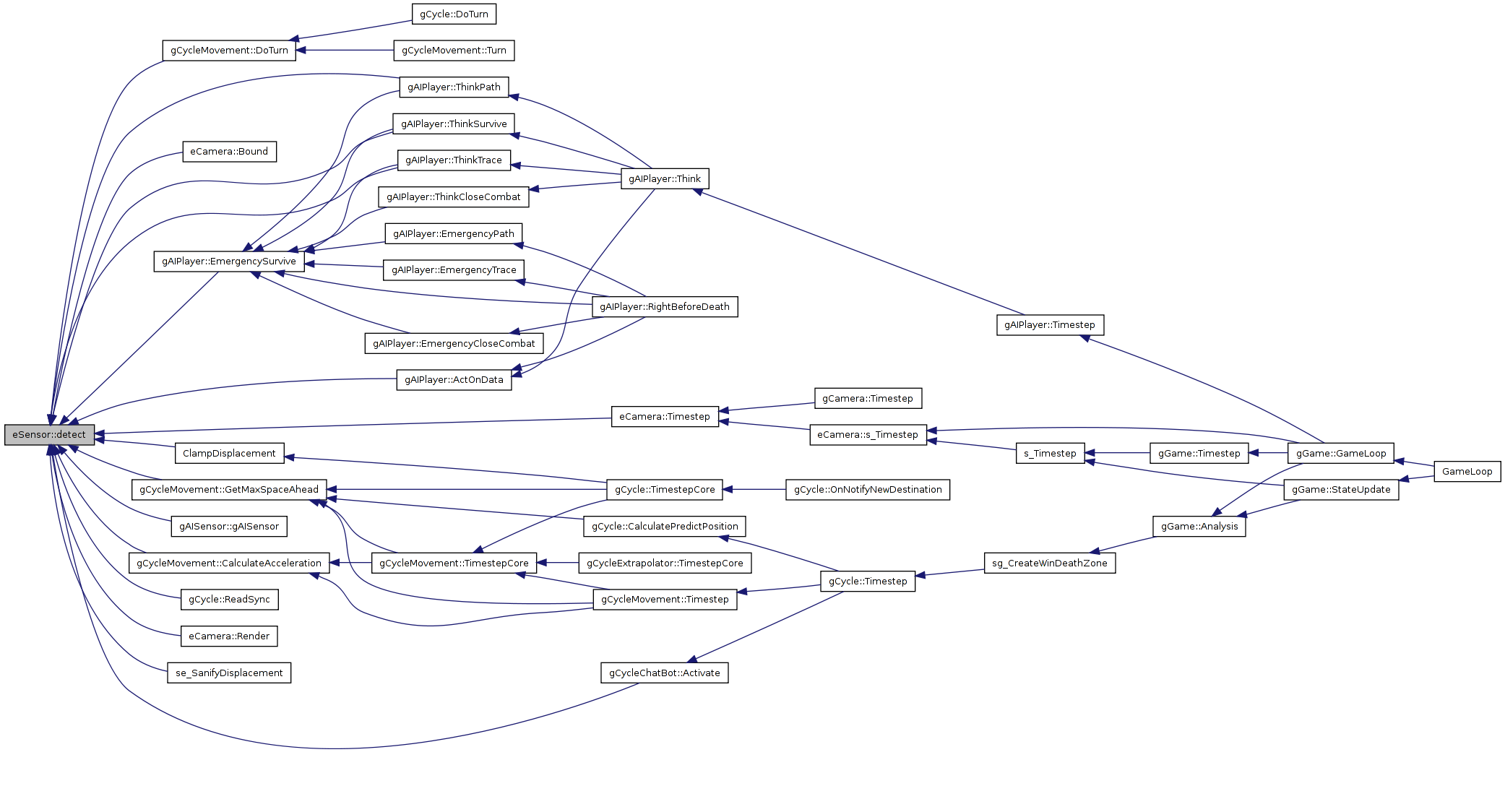
Referenced by gCycleChatBot::Activate(), gAIPlayer::ActOnData(), eCamera::Bound(), gCycleMovement::CalculateAcceleration(), ClampDisplacement(), gCycleMovement::DoTurn(), gAIPlayer::EmergencySurvive(), gAISensor::gAISensor(), gCycleMovement::GetMaxSpaceAhead(), gCycle::ReadSync(), eCamera::Render(), se_SanifyDisplacement(), gAIPlayer::ThinkPath(), gAIPlayer::ThinkSurvive(), gAIPlayer::ThinkTrace(), and eCamera::Timestep().
00095 { 00096 // eCoord start = pos; 00097 // pos=pos+dir*.01; 00098 before_hit=pos+dir*(range-.001); 00099 hit=range+.00001f; 00100 ehit = 0; 00101 00102 /* 00103 { 00104 ePoint a(pos); 00105 ePoint b(pos+dir*range); 00106 eEdge e(&a,&b); 00107 00108 00109 for(int i=eGameObject::gameObjects.Len()-1;i>=0;i--){ 00110 eGameObject *target=gameobject::gameObjects(i); 00111 00112 if (target->type()==ArmageTron_CYCLE){ 00113 gCycle *c=(gCycle *)target; 00114 if (c->Alive() && c!=owned){ 00115 const eEdge *oe=c->Edge(); 00116 if (oe){ 00117 ePoint *meet=e.IntersectWith(oe); 00118 00119 if (meet){ // whoops. Hit! 00120 REAL ratio=oe->Ratio(*meet); 00121 // gPlayerWall *w=(gPlayerWall *)oe->w; 00122 REAL time=e.Ratio(*meet)*range; 00123 PassEdge(oe,time,ratio,1); 00124 delete meet; 00125 } 00126 } 00127 } 00128 } 00129 } 00130 } 00131 */ 00132 00133 try 00134 { 00135 Move(pos+dir*range,0,range); 00136 } 00137 catch( eSensorFinished & e ) 00138 { 00139 } 00140 00141 #ifdef DEBUGLINE 00142 if (hit < range) 00143 { 00144 eDebugLine::SetColor (0, 1, 1); 00145 eDebugLine::Draw(start, .1, before_hit, .1); 00146 00147 eDebugLine::SetColor (0, .5, 1); 00148 eDebugLine::Draw(before_hit, .1, before_hit, 2.0); 00149 } 00150 else 00151 { 00152 eDebugLine::SetColor (1, 0, 0); 00153 eDebugLine::Draw(start, .5, pos, .5); 00154 } 00155 #endif 00156 }
| void eSensor::SetCurrentFace | ( | eFace * | f | ) | [inline] |
Definition at line 52 of file eSensor.h.
References eGameObject::currentFace.
00052 { currentFace = f ; }
Sets the inverse speed of the sensor.
| inverseSpeed | the inverse speed of the sensor to set |
Definition at line 106 of file eSensor.h.
References inverseSpeed_.
00107 { 00108 this->inverseSpeed_ = inverseSpeed; 00109 return *this; 00110 }
| REAL eSensor::GetInverseSpeed | ( | void | ) | const [inline] |
Gets the inverse speed of the sensor.
Definition at line 73 of file eSensor.h.
00074 { 00075 return this->inverseSpeed_; 00076 }
Gets the inverse speed of the sensor.
| inverseSpeed | the inverse speed of the sensor to fill |
Definition at line 89 of file eSensor.h.
References inverseSpeed_.
00090 { 00091 inverseSpeed = this->inverseSpeed_; 00092 return *this; 00093 }
| eSensor::tCHECKED_PTR | ( | eGameObject | ) | [protected] |
Definition at line 41 of file eSensor.h.
Referenced by gCycleChatBot::Activate(), gAIPlayer::ActOnData(), eCamera::Bound(), gCycleMovement::CalculateAcceleration(), ClampDisplacement(), detect(), gCycleMovement::DoTurn(), gAIPlayer::EmergencySurvive(), gAISensor::gAISensor(), gCycleMovement::GetMaxSpaceAhead(), PassEdge(), eCamera::Render(), se_SanifyDisplacement(), sg_Gap(), gAIPlayer::ThinkPath(), gAIPlayer::ThinkSurvive(), gAIPlayer::ThinkTrace(), and eCamera::Timestep().
| int eSensor::lr |
Definition at line 43 of file eSensor.h.
Referenced by gHitData::AddHit(), blocks(), gCycleChatBot::Distance(), gSensor::PassEdge(), and PassEdge().
| eCoord eSensor::before_hit |
Definition at line 44 of file eSensor.h.
Referenced by gHitData::AddHit(), gEnemyInfluence::AddSensor(), blocks(), eCamera::Bound(), detect(), gCycleChatBot::Distance(), PassEdge(), gCycle::ReadSync(), and sg_DropTempWall().
REAL eSensor::inverseSpeed_ [private] |
Definition at line 60 of file eSensor.h.
Referenced by GetInverseSpeed(), PassEdge(), and SetInverseSpeed().
 1.5.4
1.5.4