Public Member Functions | |
| Sensor (gCycle *o, const eCoord &start, const eCoord &d) | |
| virtual void | PassEdge (const eWall *ww, REAL time, REAL a, int r) |
| bool | DoExtraDetectionStuff () |
| REAL | HitWallExtends (eCoord const &dir, eCoord const &origin) |
Public Attributes | |
| gCycle * | hitOwner_ |
| REAL | hitTime_ |
| REAL | hitDistance_ |
| short | lrSuggestion_ |
| int | windingNumber_ |
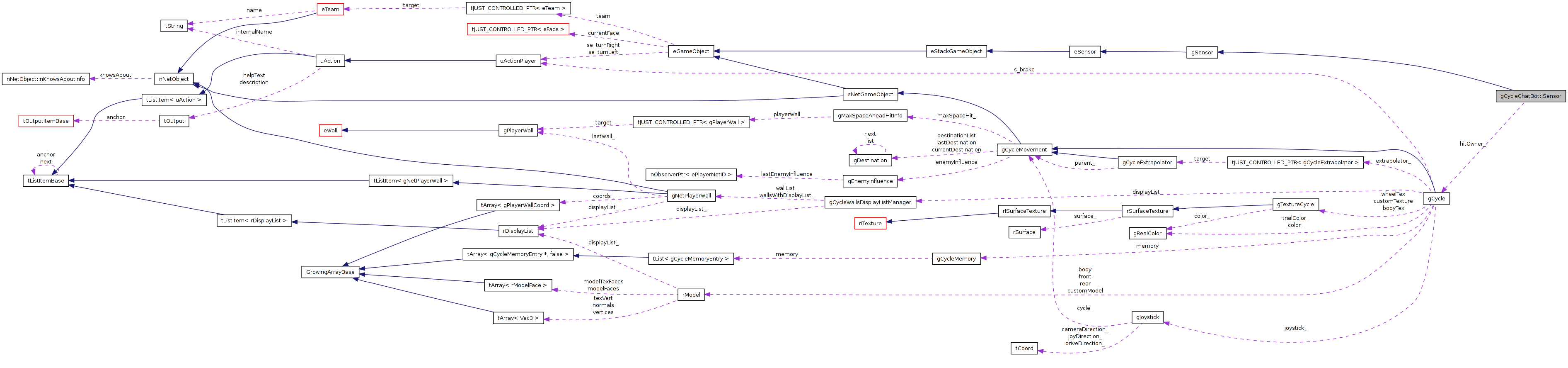
Definition at line 329 of file gCycle.cpp.
| gCycleChatBot::Sensor::Sensor | ( | gCycle * | o, | |
| const eCoord & | start, | |||
| const eCoord & | d | |||
| ) | [inline] |
Definition at line 332 of file gCycle.cpp.
References gCycleMovement::GetDistance().
00333 : gSensor(o,start,d) 00334 , hitOwner_( 0 ) 00335 , hitTime_ ( 0 ) 00336 , hitDistance_( o->MaxWallsLength() ) 00337 , lrSuggestion_( 0 ) 00338 , windingNumber_( 0 ) 00339 { 00340 if ( hitDistance_ <= 0 ) 00341 hitDistance_ = o->GetDistance(); 00342 }

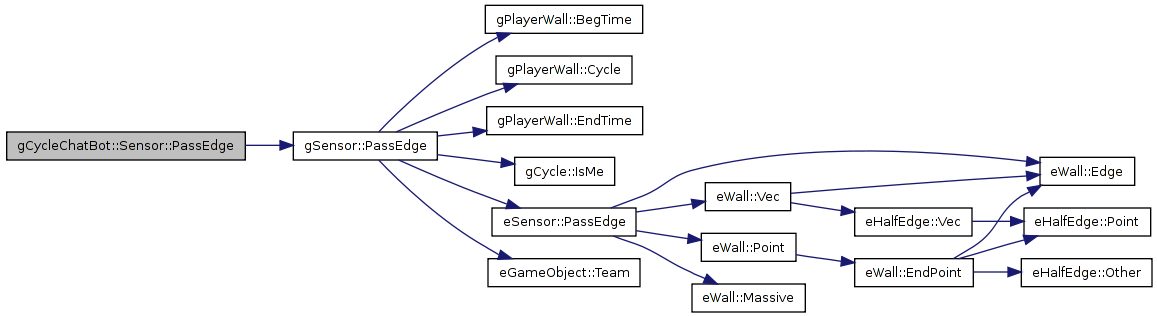
| virtual void gCycleChatBot::Sensor::PassEdge | ( | const eWall * | ww, | |
| REAL | time, | |||
| REAL | a, | |||
| int | r | |||
| ) | [inline, virtual] |
Reimplemented from gSensor.
Definition at line 352 of file gCycle.cpp.
References gSensor::PassEdge().
00353 { 00354 try{ 00355 gSensor::PassEdge(ww,time,a,r); 00356 } 00357 catch( eSensorFinished & e ) 00358 { 00359 if ( DoExtraDetectionStuff() ) 00360 throw; 00361 } 00362 }
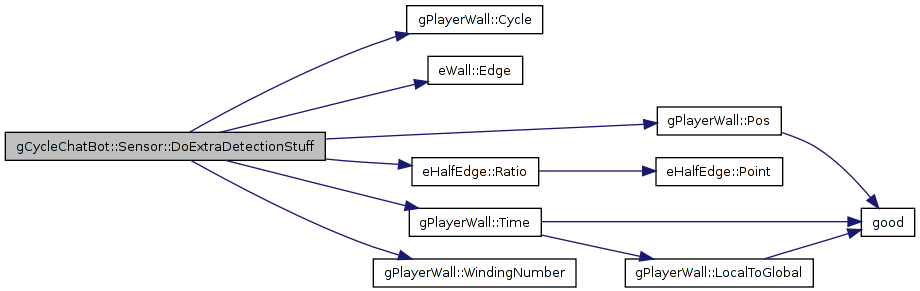
| bool gCycleChatBot::Sensor::DoExtraDetectionStuff | ( | ) | [inline] |
Definition at line 364 of file gCycle.cpp.
References gPlayerWall::Cycle(), eWall::Edge(), gSENSOR_NONE, gSENSOR_RIM, gSENSOR_SELF, gPlayerWall::Pos(), eHalfEdge::Ratio(), REAL, sg_chatBotNewWallBlindness, gPlayerWall::Time(), and gPlayerWall::WindingNumber().
00365 { 00366 // move towards the beginning of a wall 00367 lrSuggestion_ = -lr; 00368 00369 switch ( type ) 00370 { 00371 case gSENSOR_NONE: 00372 case gSENSOR_RIM: 00373 lrSuggestion_ = 0; 00374 return true; 00375 default: 00376 // unless it is an enemy, follow his wall instead (uncomment for a nasty cowardy campbot) 00377 // lrSuggestion *= -1; 00378 case gSENSOR_SELF: 00379 { 00380 // determine whether we're hitting the front or back half of his wall 00381 if ( !ehit ) 00382 return true; 00383 eWall * wall = ehit->GetWall(); 00384 if ( !wall ) 00385 return true; 00386 gPlayerWall * playerWall = dynamic_cast< gPlayerWall * >( wall ); 00387 if ( !playerWall ) 00388 return true; 00389 hitOwner_ = playerWall->Cycle(); 00390 if ( !hitOwner_ ) 00391 return true; 00392 00393 // gCycleChatBot & enemyChatBot = Get( hitOwner_ ); 00394 00395 REAL wallAlpha = playerWall->Edge()->Ratio( before_hit ); 00396 // that's an unreliable source 00397 if ( wallAlpha < 0 ) 00398 wallAlpha = 0; 00399 if ( wallAlpha > 1 ) 00400 wallAlpha = 1; 00401 hitDistance_ = hitOwner_->GetDistance() - playerWall->Pos( wallAlpha ); 00402 hitTime_ = playerWall->Time( wallAlpha ); 00403 windingNumber_ = playerWall->WindingNumber(); 00404 00405 // don't see new walls 00406 if ( hitTime_ > hitOwner_->LastTime() - sg_chatBotNewWallBlindness && hitOwner_ != owned ) 00407 { 00408 ehit = false; 00409 hit = 1E+40; 00410 return false; 00411 } 00412 00413 // REAL cycleDistance = hitOwner_->GetDistance(); 00414 00415 // REAL wallStart = 0; 00416 00417 /* 00418 if ( gCycle::WallsLength() > 0 ) 00419 { 00420 wallStart = cyclePos - playerWall->Cycle()->ThisWallsLength(); 00421 if ( wallStart < 0 ) 00422 wallStart = 0; 00423 } 00424 */ 00425 } 00426 } 00427 00428 return true; 00429 }
| REAL gCycleChatBot::Sensor::HitWallExtends | ( | eCoord const & | dir, | |
| eCoord const & | origin | |||
| ) | [inline] |
Definition at line 432 of file gCycle.cpp.
Referenced by gCycleChatBot::Activate().
00433 { 00434 if ( !ehit || !ehit->Other() ) 00435 { 00436 return 1E+30; 00437 } 00438 00439 REAL ret = -1E+30; 00440 eCoord ends[2] = { *ehit->Point(), *ehit->Other()->Point() }; 00441 for ( int i = 1; i>=0; --i ) 00442 { 00443 REAL newRet = eCoord::F( dir, ends[i]-origin ); 00444 if ( newRet > ret ) 00445 ret = newRet; 00446 } 00447 00448 return ret; 00449 }

Definition at line 451 of file gCycle.cpp.
Referenced by gCycleChatBot::Activate(), gCycleChatBot::Distance(), and gCycleChatBot::FindHugReplacement().
Definition at line 454 of file gCycle.cpp.
 1.5.4
1.5.4