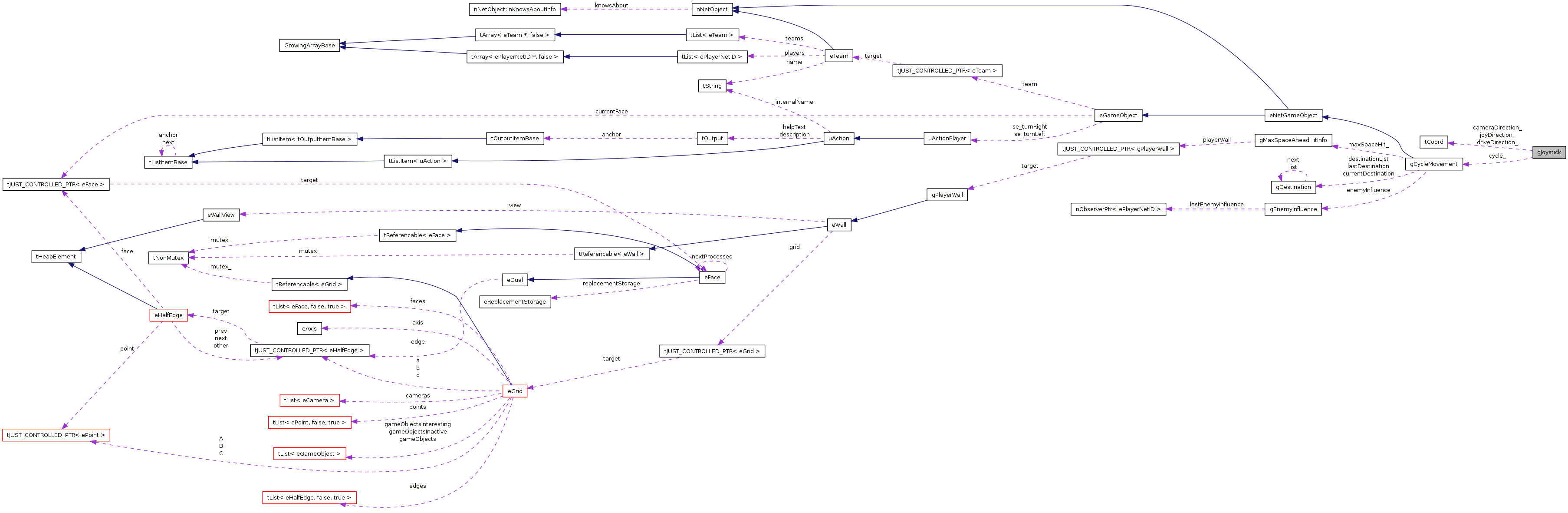
#include <gJoystick.h>
Public Member Functions | |
| gJoystick (gCycleMovement *cycle) | |
| bool | Act (uActionPlayer *act, REAL value) |
| process input events | |
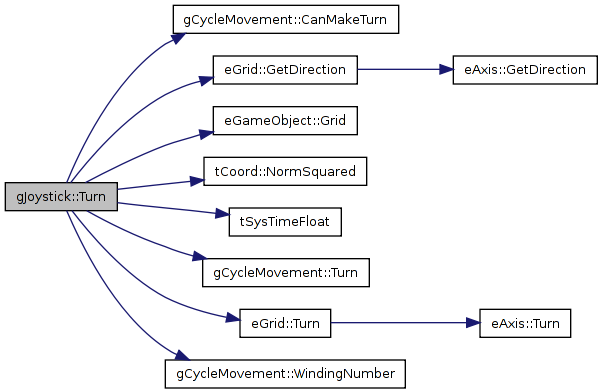
| void | Turn () |
| turn the cycle | |
Private Member Functions | |
| bool | ActInternal (uActionPlayer *act, REAL value) |
Private Attributes | |
| gCycleMovement * | cycle_ |
| the cycle controlled by this joystick | |
| tCoord | cameraDirection_ |
| the direction the camera is supposed to look in | |
| tCoord | driveDirection_ |
| the direction the cycle is supposed to drive in | |
| tCoord | joyDirection_ |
| direction the joystick is currently pointing in | |
| double | lastCommand_ |
| last time the joystick was clearly pushed into some direction | |
| int | lastTurn_ |
| last ordered turn direction | |
| bool | glance_ |
| whether the glance button is pressed | |
| bool | turnRequested_ |
| internal flag indicating further turns may be required | |
Friends | |
| class | gCycle |
Definition at line 40 of file gJoystick.h.
| gJoystick::gJoystick | ( | gCycleMovement * | cycle | ) | [inline] |
Definition at line 44 of file gJoystick.h.
00045 : cycle_( cycle ), lastCommand_( 0 ), lastTurn_(0), glance_( false ), turnRequested_( false ) 00046 { 00047 }
| bool gJoystick::Act | ( | uActionPlayer * | act, | |
| REAL | value | |||
| ) |
process input events
Definition at line 42 of file gJoystick.cpp.
References ActInternal(), eGameObject::CamDir(), cameraDirection_, tCoord::Conj(), cycle_, gCycleMovement::Direction(), driveDirection_, glance_, joyDirection_, lastCommand_, tCoord::Normalize(), tCoord::NormSquared(), tSysTimeFloat(), tCoord::Turn(), and turnRequested_.
Referenced by gCycle::Act().
00043 { 00044 if ( joyDirection_.NormSquared() > .5 ) 00045 { 00046 lastCommand_ = tSysTimeFloat(); 00047 } 00048 00049 if ( ActInternal( act, value ) ) 00050 { 00051 // update directions 00052 if ( joyDirection_.NormSquared() > .5 ) 00053 { 00054 // fetch driving direction if required 00055 if ( driveDirection_.NormSquared() < .1 ) 00056 { 00057 // con << joyDirection_ << "\n"; 00058 00059 driveDirection_ = cycle_->Direction(); 00060 driveDirection_.Normalize(); 00061 } 00062 00063 // fetch camera direction if required 00064 if ( cameraDirection_.NormSquared() < .1 ) 00065 { 00066 cameraDirection_ = cycle_->CamDir(); 00067 cameraDirection_.Normalize(); 00068 } 00069 00070 tCoord dir = joyDirection_; 00071 dir.Normalize(); 00072 if ( glance_ ) 00073 { 00074 // adapt viewing direction to driving direction 00075 cameraDirection_ = driveDirection_.Turn( dir.Conj() ); 00076 } 00077 else 00078 { 00079 // adapt driving direction to view direction 00080 driveDirection_ = cameraDirection_.Turn( dir ); 00081 } 00082 00083 // possibly turn 00084 turnRequested_ = true; 00085 // Turn(); 00086 } 00087 00088 return true; 00089 } 00090 00091 return false; 00092 }


| void gJoystick::Turn | ( | ) |
turn the cycle
Definition at line 95 of file gJoystick.cpp.
References cameraDirection_, gCycleMovement::CanMakeTurn(), cycle_, driveDirection_, eCoord, eGrid::GetDirection(), eGameObject::Grid(), joyDirection_, lastCommand_, lastTurn_, tCoord::NormSquared(), REAL, tSysTimeFloat(), gCycleMovement::Turn(), eGrid::Turn(), turnRequested_, and gCycleMovement::WindingNumber().
Referenced by gCycle::TimestepCore().
00096 { 00097 if ( joyDirection_.NormSquared() < .1 && lastCommand_ < tSysTimeFloat() - .03 ) 00098 { 00099 // if ( driveDirection_.NormSquared() > .5 ) 00100 // con << joyDirection_ << "\n"; 00101 00102 // joystick was released, reeset driving direction and camera direction. 00103 driveDirection_ = tCoord(); 00104 cameraDirection_ = tCoord(); 00105 return; 00106 } 00107 00108 // nothing to do 00109 if ( !turnRequested_ ) 00110 { 00111 return; 00112 } 00113 00114 // fetch current and possible turn driving directions 00115 int winding = cycle_->WindingNumber(); 00116 int windingLeft = winding, windingRight = winding; 00117 eGrid * grid = cycle_->Grid(); 00118 grid->Turn( windingLeft, -1 ); 00119 grid->Turn( windingRight, +1 ); 00120 eCoord leftTurn = grid->GetDirection( windingLeft ); 00121 eCoord rightTurn = grid->GetDirection( windingRight ); 00122 eCoord straightOn = grid->GetDirection( winding ); 00123 00124 // normalize them (axes may be unnormalized) 00125 leftTurn.Normalize(); 00126 rightTurn.Normalize(); 00127 straightOn.Normalize(); 00128 00129 // calculate distances between desired and possible driving directions 00130 REAL left = ( leftTurn - driveDirection_ ).NormSquared(); 00131 REAL right = ( rightTurn - driveDirection_ ).NormSquared(); 00132 REAL straight = ( straightOn - driveDirection_ ).NormSquared(); 00133 00134 // possibly turn 00135 if ( left < right && left < straight * ( lastTurn_ != 1 ? 2 : .8 ) ) 00136 { 00137 if ( cycle_->CanMakeTurn( -1 ) ) 00138 { 00139 cycle_->Turn( -1 ); 00140 lastTurn_ = -1; 00141 } 00142 } 00143 else if ( left > right && right < straight * ( lastTurn_ != -1 ? 2 : .8 ) ) 00144 { 00145 if( cycle_->CanMakeTurn( +1 ) ) 00146 { 00147 cycle_->Turn( +1 ); 00148 lastTurn_ = +1; 00149 } 00150 } 00151 else 00152 { 00153 // not much use repeating this calculation until new input arrives 00154 turnRequested_ = false; 00155 lastTurn_ = 0; 00156 } 00157 }

| bool gJoystick::ActInternal | ( | uActionPlayer * | act, | |
| REAL | value | |||
| ) | [private] |
Definition at line 159 of file gJoystick.cpp.
References glance_, joyDirection_, sg_JoyDown, sg_JoyGlance, sg_JoyLeft, sg_JoyRight, sg_JoyUp, tCoord::x, and tCoord::y.
Referenced by Act().
00160 { 00161 if ( act == & sg_JoyUp ) 00162 { 00163 joyDirection_.x = value; 00164 return true; 00165 } 00166 if ( act == & sg_JoyDown ) 00167 { 00168 joyDirection_.x = -value; 00169 return true; 00170 } 00171 if ( act == & sg_JoyLeft ) 00172 { 00173 joyDirection_.y = value; 00174 return true; 00175 } 00176 if ( act == & sg_JoyRight ) 00177 { 00178 joyDirection_.y = -value; 00179 return true; 00180 } 00181 if ( act == & sg_JoyGlance ) 00182 { 00183 glance_ = ( value > .5 ); 00184 return true; 00185 } 00186 00187 return false; 00188 }

friend class gCycle [friend] |
Definition at line 42 of file gJoystick.h.
gCycleMovement* gJoystick::cycle_ [private] |
tCoord gJoystick::cameraDirection_ [private] |
the direction the camera is supposed to look in
Definition at line 58 of file gJoystick.h.
Referenced by Act(), gCycle::CamDir(), gCycle::Direction(), and Turn().
tCoord gJoystick::driveDirection_ [private] |
tCoord gJoystick::joyDirection_ [private] |
direction the joystick is currently pointing in
Definition at line 60 of file gJoystick.h.
Referenced by Act(), ActInternal(), and Turn().
double gJoystick::lastCommand_ [private] |
last time the joystick was clearly pushed into some direction
Definition at line 62 of file gJoystick.h.
int gJoystick::lastTurn_ [private] |
bool gJoystick::glance_ [private] |
whether the glance button is pressed
Definition at line 65 of file gJoystick.h.
Referenced by Act(), and ActInternal().
bool gJoystick::turnRequested_ [private] |
 1.5.4
1.5.4