#include <body.h>
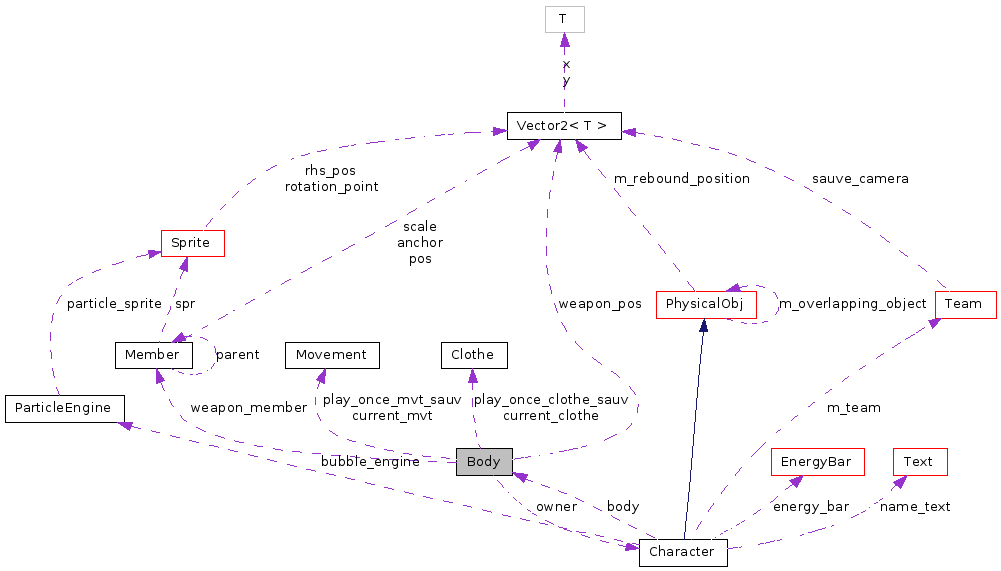
Collaboration diagram for Body:
Definition at line 47 of file body.h.
| enum Body::Direction_t |
Definition at line 50 of file body.h.
00051 { 00052 DIRECTION_LEFT = -1, 00053 DIRECTION_RIGHT = 1 00054 } Direction_t;
| Body::Body | ( | xmlpp::Element * | xml, | |
| Profile * | res | |||
| ) |
Definition at line 36 of file body.cpp.
00037 { 00038 need_rebuild = true; 00039 current_clothe = NULL; 00040 current_mvt = NULL; 00041 walk_events = 0; 00042 animation_number = 0; 00043 direction = DIRECTION_RIGHT; 00044 main_rotation_rad = 0; 00045 00046 // Load members 00047 xmlpp::Node::NodeList nodes = xml -> get_children("sprite"); 00048 xmlpp::Node::NodeList::iterator it=nodes.begin(); 00049 00050 while(it != nodes.end()) 00051 { 00052 xmlpp::Element *elem = dynamic_cast<xmlpp::Element*> (*it); 00053 std::string name; 00054 XmlReader::ReadStringAttr( elem, "name", name); 00055 00056 Member* member = new Member(elem, res); 00057 if(members_lst.find(name) != members_lst.end()) 00058 std::cerr << "Warning !! The member \""<< name << "\" is defined twice in the xml file" << std::endl; 00059 else 00060 members_lst[name] = member; 00061 00062 it++; 00063 } 00064 00065 // Add a special weapon member to the body 00066 weapon_member = new WeaponMember(); 00067 members_lst["weapon"] = weapon_member; 00068 00069 // Load clothes 00070 xmlpp::Node::NodeList nodes2 = xml -> get_children("clothe"); 00071 xmlpp::Node::NodeList::iterator it2=nodes2.begin(); 00072 00073 while(it2 != nodes2.end()) 00074 { 00075 xmlpp::Element *elem = dynamic_cast<xmlpp::Element*> (*it2); 00076 std::string name; 00077 XmlReader::ReadStringAttr( elem, "name", name); 00078 00079 Clothe* clothe = new Clothe(elem, members_lst); 00080 if (clothes_lst.find(name) != clothes_lst.end()) 00081 std::cerr << "Warning !! The clothe \""<< name << "\" is defined twice in the xml file" << std::endl; 00082 else 00083 clothes_lst[name] = clothe; 00084 00085 it2++; 00086 } 00087 00088 // Load movements alias 00089 xmlpp::Node::NodeList nodes4 = xml -> get_children("alias"); 00090 xmlpp::Node::NodeList::iterator it4=nodes4.begin(); 00091 std::map<std::string, std::string> mvt_alias; 00092 while(it4 != nodes4.end()) 00093 { 00094 xmlpp::Element *elem = dynamic_cast<xmlpp::Element*> (*it4); 00095 std::string mvt, corresp; 00096 XmlReader::ReadStringAttr( elem, "movement", mvt); 00097 XmlReader::ReadStringAttr( elem, "correspond_to", corresp); 00098 mvt_alias.insert(std::make_pair(mvt,corresp)); 00099 it4++; 00100 } 00101 00102 // Load movements 00103 xmlpp::Node::NodeList nodes3 = xml -> get_children("movement"); 00104 xmlpp::Node::NodeList::iterator it3=nodes3.begin(); 00105 00106 while(it3 != nodes3.end()) 00107 { 00108 xmlpp::Element *elem = dynamic_cast<xmlpp::Element*> (*it3); 00109 std::string name; 00110 XmlReader::ReadStringAttr( elem, "name", name); 00111 if(strncmp(name.c_str(),"animation", 9)==0) 00112 animation_number++; 00113 00114 Movement* mvt = new Movement(elem); 00115 if(mvt_lst.find(name) != mvt_lst.end()) 00116 std::cerr << "Warning !! The movement \""<< name << "\" is defined twice in the xml file" << std::endl; 00117 else 00118 mvt_lst[name] = mvt; 00119 00120 for(std::map<std::string, std::string>::iterator it = mvt_alias.begin(); 00121 it != mvt_alias.end(); ++it) 00122 if(it->second == name) 00123 { 00124 Movement* mvt = new Movement(elem); 00125 mvt->type = it->first; 00126 mvt_lst[it->first] = mvt; 00127 } 00128 it3++; 00129 } 00130 }
Here is the call graph for this function:

| Body::Body | ( | Body * | _body | ) |
Definition at line 132 of file body.cpp.
00133 { 00134 need_rebuild = true; 00135 current_clothe = NULL; 00136 current_mvt = NULL; 00137 walk_events = 0; 00138 animation_number = _body->animation_number; 00139 direction = DIRECTION_RIGHT; 00140 main_rotation_rad = 0; 00141 00142 // Add a special weapon member to the body 00143 weapon_member = new WeaponMember(); 00144 members_lst["weapon"] = weapon_member; 00145 00146 // Make a copy of members 00147 std::map<std::string, Member*>::iterator it1 = _body->members_lst.begin(); 00148 while(it1 != _body->members_lst.end()) 00149 if(it1->second->name != "weapon") 00150 { 00151 std::pair<std::string,Member*> p; 00152 p.first = it1->first; 00153 p.second = new Member(it1->second); 00154 members_lst.insert(p); 00155 it1++; 00156 } 00157 else 00158 it1++; 00159 00160 // Make a copy of clothes 00161 std::map<std::string, Clothe*>::iterator it2 = _body->clothes_lst.begin(); 00162 while(it2 != _body->clothes_lst.end()) 00163 { 00164 std::pair<std::string,Clothe*> p; 00165 p.first = it2->first; 00166 p.second = new Clothe(it2->second, members_lst); 00167 clothes_lst.insert(p); 00168 it2++; 00169 } 00170 00171 // Movement are shared 00172 std::map<std::string, Movement*>::iterator it3 = _body->mvt_lst.begin(); 00173 while(it3 != _body->mvt_lst.end()) 00174 { 00175 std::pair<std::string,Movement*> p; 00176 p.first = it3->first; 00177 p.second = it3->second; 00178 mvt_lst.insert(p); 00179 it3++; 00180 } 00181 }
| Body::~Body | ( | ) |
Definition at line 183 of file body.cpp.
00184 { 00185 // Pointers inside those lists are freed from the body_list 00186 // Clean the members list 00187 std::map<std::string, Member*>::iterator it = members_lst.begin(); 00188 while(it != members_lst.end()) 00189 { 00190 delete it->second; 00191 it++; 00192 } 00193 00194 // Clean the clothes list 00195 std::map<std::string, Clothe*>::iterator it2 = clothes_lst.begin(); 00196 while(it2 != clothes_lst.end()) 00197 { 00198 delete it2->second; 00199 it2++; 00200 } 00201 00202 members_lst.clear(); 00203 clothes_lst.clear(); 00204 mvt_lst.clear(); 00205 }
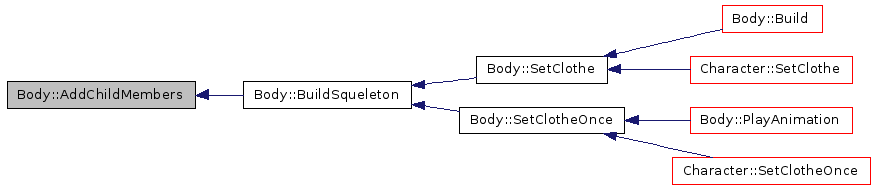
| void Body::AddChildMembers | ( | Member * | parent | ) | [private] |
Definition at line 375 of file body.cpp.
00376 { 00377 // Add child members of the parent member to the squeleton 00378 // and continue recursively with child members 00379 for(std::map<std::string, v_attached>::iterator child = parent->attached_members.begin(); 00380 child != parent->attached_members.end(); 00381 child++) 00382 { 00383 // Find if the current clothe uses this member: 00384 for(uint lay = 0; lay < current_clothe->layers.size(); lay++) 00385 { 00386 if(current_clothe->layers[lay]->type == child->first) 00387 { 00388 // This child member is attached to his parent 00389 junction body; 00390 body.member = current_clothe->layers[lay]; 00391 body.parent = parent; 00392 squel_lst.push_back(body); 00393 00394 // continue recursively 00395 AddChildMembers(current_clothe->layers[lay]); 00396 } 00397 } 00398 } 00399 }
Here is the caller graph for this function:
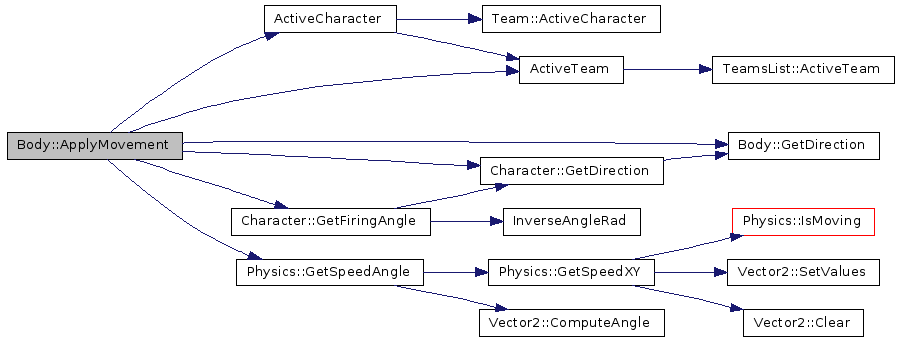
Definition at line 213 of file body.cpp.
00214 { 00215 // Move each member following the movement description 00216 // We do it using the order of the squeleton, as the movement of each 00217 // member affect the child members as well 00218 std::vector<junction>::iterator member = squel_lst.begin(); 00219 for(;member != squel_lst.end(); 00220 member++) 00221 { 00222 assert( frame < mvt->frames.size() ); 00223 if(mvt->frames[frame].find(member->member->type) != mvt->frames[frame].end()) 00224 { 00225 // This member needs to be moved : 00226 member_mvt mb_mvt = mvt->frames[frame].find(member->member->type)->second; 00227 if(mb_mvt.follow_crosshair && ActiveCharacter().body == this && ActiveTeam().AccessWeapon().UseCrossHair()) 00228 { 00229 // Use the movement of the crosshair 00230 double angle = owner->GetFiringAngle(); /* Get -2 * M_PI < angle =< 2 * M_PI*/ 00231 if(angle < 0) 00232 angle += 2 * M_PI; // so now 0 < angle < 2 * M_PI; 00233 if(ActiveCharacter().GetDirection() == DIRECTION_LEFT) 00234 angle = M_PI - angle; 00235 00236 mb_mvt.SetAngle(mb_mvt.GetAngle() + angle); 00237 } 00238 00239 if(mb_mvt.follow_half_crosshair && ActiveCharacter().body == this && ActiveTeam().AccessWeapon().UseCrossHair()) 00240 { 00241 // Use the movement of the crosshair 00242 double angle_rad = owner->GetFiringAngle(); // returns -180 < angle < 180 00243 if(ActiveCharacter().GetDirection() == DIRECTION_RIGHT) 00244 angle_rad /= 2; // -90 < angle < 90 00245 else 00246 if(angle_rad > M_PI_2) 00247 angle_rad = M_PI_2 - angle_rad / 2;//formerly in deg to 45 + (90 - angle) / 2; 00248 else 00249 angle_rad = -M_PI_2 - angle_rad / 2;//formerly in deg to -45 + (-90 - angle) / 2; 00250 00251 00252 00253 if(angle_rad < 0) 00254 angle_rad += 2 * M_PI; // so now 0 < angle < 2 * M_PI; 00255 00256 mb_mvt.SetAngle(mb_mvt.GetAngle() + angle_rad); 00257 } 00258 00259 if(mb_mvt.follow_speed) 00260 { 00261 // Use the movement of the character 00262 double angle_rad = (owner->GetSpeedAngle()); 00263 if(angle_rad < 0) 00264 angle_rad += 2 * M_PI; // so now 0 < angle < 2 * M_PI; 00265 if(owner->GetDirection() == DIRECTION_LEFT) 00266 angle_rad = M_PI - angle_rad; 00267 00268 mb_mvt.SetAngle(mb_mvt.GetAngle() + angle_rad); 00269 } 00270 00271 if(mb_mvt.follow_direction) 00272 { 00273 // Use the direction of the character 00274 if(owner->GetDirection() == DIRECTION_LEFT) 00275 mb_mvt.SetAngle(mb_mvt.GetAngle() + M_PI); 00276 } 00277 00278 00279 member->member->ApplyMovement(mb_mvt, squel_lst); 00280 } 00281 } 00282 }
Here is the call graph for this function:
Here is the caller graph for this function:

| void Body::ApplySqueleton | ( | ) | [private] |
Definition at line 284 of file body.cpp.
00285 { 00286 // Move each member following the squeleton 00287 std::vector<junction>::iterator member = squel_lst.begin(); 00288 // The first member is the body, we set it to pos: 00289 member->member->pos = Point2f(0,0); 00290 member->member->SetAngle(0); 00291 member++; 00292 00293 for(;member != squel_lst.end(); 00294 member++) 00295 { 00296 // Place the other members depending of the parent member: 00297 member->member->ApplySqueleton(member->parent); 00298 } 00299 }
Here is the caller graph for this function:

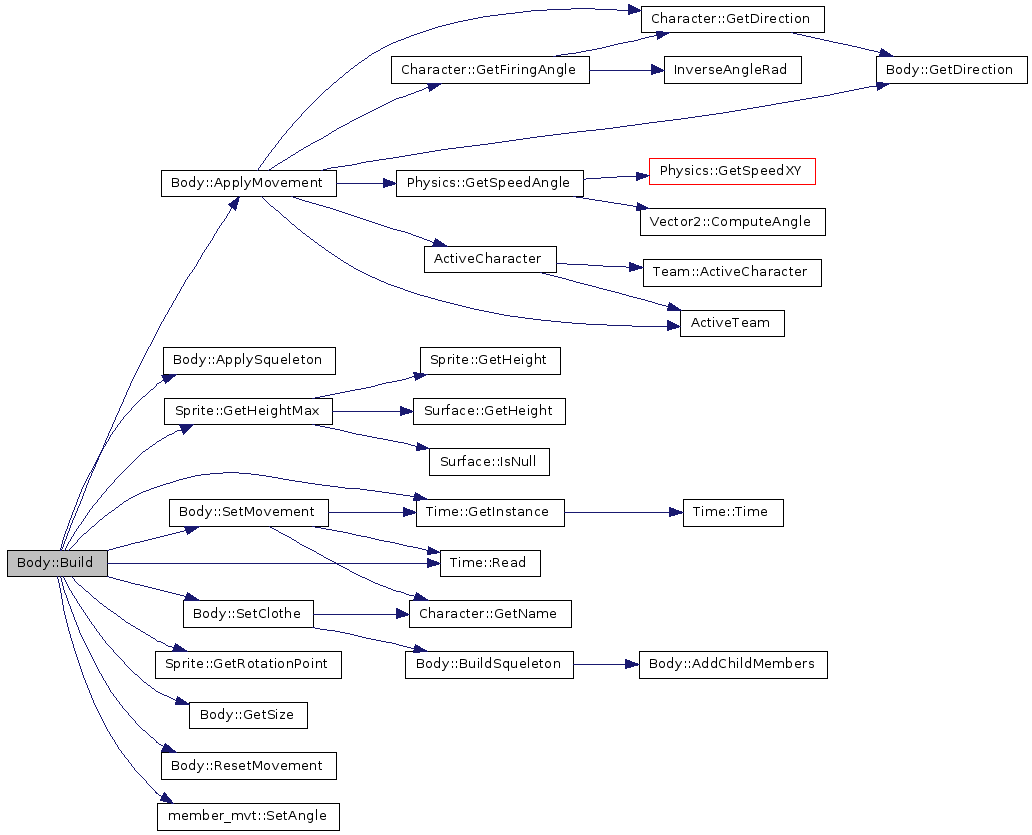
| void Body::Build | ( | ) |
Definition at line 301 of file body.cpp.
00302 { 00303 // Increase frame number if needed 00304 unsigned int last_frame = current_frame; 00305 if(walk_events > 0 || current_mvt->type!="walk") 00306 if(Time::GetInstance()->Read() > last_refresh + current_mvt->speed) 00307 { 00308 current_frame += (Time::GetInstance()->Read()-last_refresh) / current_mvt->speed; 00309 last_refresh += ((Time::GetInstance()->Read()-last_refresh) / current_mvt->speed) * current_mvt->speed; 00310 00311 if(current_frame >= current_mvt->frames.size()) 00312 { 00313 if(play_once_clothe_sauv) 00314 SetClothe(play_once_clothe_sauv->name); 00315 if(play_once_mvt_sauv) 00316 { 00317 SetMovement(play_once_mvt_sauv->type); 00318 current_frame = play_once_frame_sauv; 00319 } 00320 } 00321 current_frame %= current_mvt->frames.size(); 00322 } 00323 00324 need_rebuild |= (last_frame != current_frame); 00325 need_rebuild |= current_mvt->always_moving; 00326 00327 if(!need_rebuild) 00328 return; 00329 00330 ResetMovement(); 00331 ApplySqueleton(); 00332 ApplyMovement(current_mvt, current_frame); 00333 00334 // Rotate each sprite, because the next part need to know the height of the sprite 00335 // once he is rotated 00336 for(int layer=0;layer < (int)current_clothe->layers.size() ;layer++) 00337 if(current_clothe->layers[layer]->name != "weapon") 00338 current_clothe->layers[layer]->RotateSprite(); 00339 00340 // Move the members to get the lowest member at the bottom of the skin rectangle 00341 member_mvt body_mvt; 00342 float y_max = 0; 00343 for(int lay=0;lay < (int)current_clothe->layers.size() ;lay++) 00344 if(current_clothe->layers[lay]->name != "weapon") 00345 { 00346 Member* member = current_clothe->layers[lay]; 00347 if(member->pos.y + member->spr->GetHeightMax() + member->spr->GetRotationPoint().y > y_max 00348 && !member->go_through_ground) 00349 y_max = member->pos.y + member->spr->GetHeightMax() + member->spr->GetRotationPoint().y; 00350 } 00351 body_mvt.pos.y = (float)GetSize().y - y_max + current_mvt->test_bottom; 00352 body_mvt.pos.x = GetSize().x / 2.0 - squel_lst.front().member->spr->GetWidth() / 2.0; 00353 body_mvt.SetAngle(main_rotation_rad); 00354 squel_lst.front().member->ApplyMovement(body_mvt, squel_lst); 00355 00356 need_rebuild = false; 00357 }
Here is the call graph for this function:
Here is the caller graph for this function:

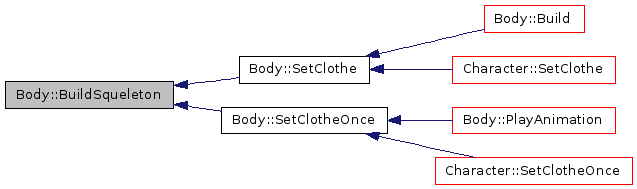
| void Body::BuildSqueleton | ( | ) | [private] |
Definition at line 401 of file body.cpp.
00402 { 00403 // Find each member used by the current clothe 00404 // and set the parent member of each member 00405 squel_lst.clear(); 00406 00407 // Find the "body" member as its the top of the squeleton 00408 for(uint lay = 0; lay < current_clothe->layers.size(); lay++) 00409 if(current_clothe->layers[lay]->type == "body") 00410 { 00411 junction body; 00412 body.member = current_clothe->layers[lay]; 00413 body.parent = NULL; 00414 squel_lst.push_back(body); 00415 break; 00416 } 00417 00418 if(squel_lst.size() == 0) 00419 { 00420 std::cerr << "Unable to find the \"body\" member in the current clothe" << std::endl; 00421 assert(false); 00422 } 00423 00424 AddChildMembers(squel_lst.front().member); 00425 }
Here is the call graph for this function:

Here is the caller graph for this function:
| void Body::Draw | ( | const Point2i & | pos | ) |
Definition at line 359 of file body.cpp.
00360 { 00361 Build(); 00362 00363 // update the weapon position 00364 if(direction == DIRECTION_RIGHT) 00365 weapon_pos = Point2i((int)weapon_member->pos.x,(int)weapon_member->pos.y); 00366 else 00367 weapon_pos = Point2i(GetSize().x - (int)weapon_member->pos.x,(int)weapon_member->pos.y); 00368 weapon_pos += _pos; 00369 00370 // Finally draw each layer one by one 00371 for(int layer=0;layer < (int)current_clothe->layers.size() ;layer++) 00372 current_clothe->layers[layer]->Draw(_pos, _pos.x + GetSize().x/2, int(direction)); 00373 }
Here is the call graph for this function:
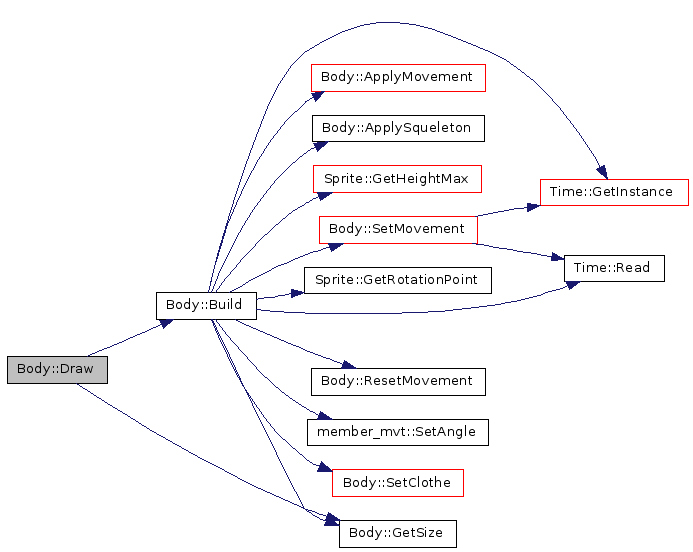
Here is the caller graph for this function:

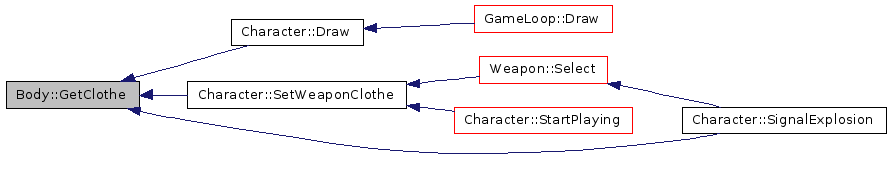
| const std::string & Body::GetClothe | ( | ) |
Definition at line 632 of file body.cpp.
00632 { return current_clothe->name; }
Here is the caller graph for this function:
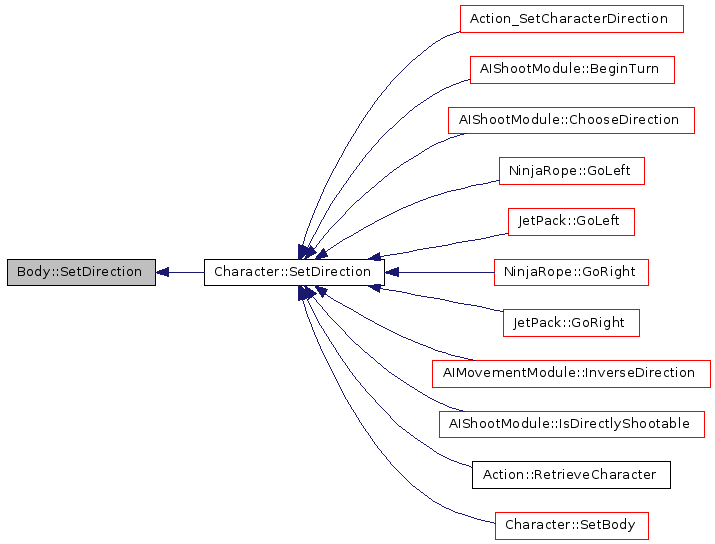
| const Body::Direction_t & Body::GetDirection | ( | ) | const |
| uint Body::GetFrame | ( | ) | [inline] |
Definition at line 122 of file body.h.
00122 { return current_frame; };
Here is the caller graph for this function:

| uint Body::GetFrameCount | ( | ) |
Definition at line 588 of file body.cpp.
00589 { 00590 return current_mvt->frames.size(); 00591 }
Here is the caller graph for this function:

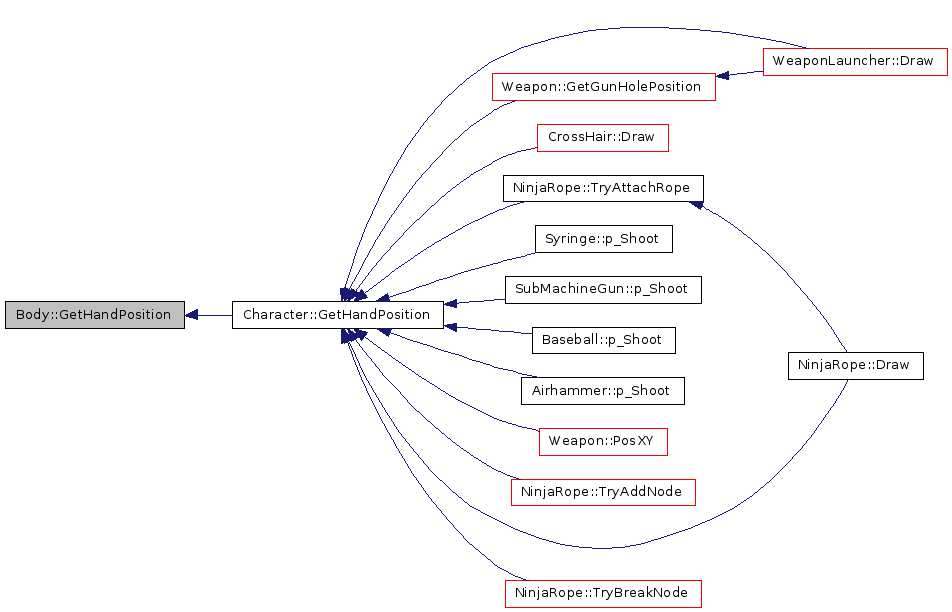
| const Point2i & Body::GetHandPosition | ( | ) | const |
Definition at line 554 of file body.cpp.
00555 { 00556 return weapon_pos; 00557 }
Here is the caller graph for this function:
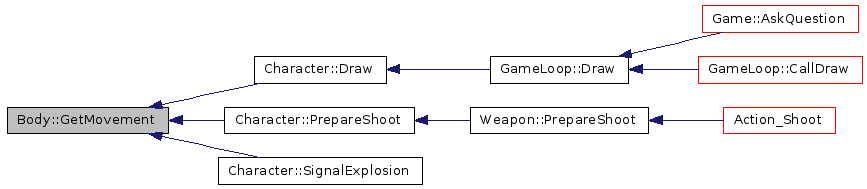
| const std::string & Body::GetMovement | ( | ) |
Definition at line 631 of file body.cpp.
00631 { return current_mvt->type; }
Here is the caller graph for this function:
| uint Body::GetMovementDuration | ( | ) |
Definition at line 583 of file body.cpp.
00584 { 00585 return current_mvt->frames.size() * current_mvt->speed; 00586 }
Here is the caller graph for this function:

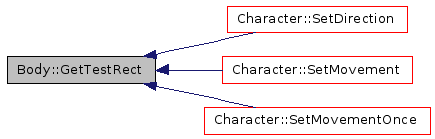
| Point2i Body::GetSize | ( | ) | [inline] |
Definition at line 528 of file body.cpp.
00529 { 00530 if(direction == DIRECTION_RIGHT) 00531 { 00532 l = current_mvt->test_left; 00533 r = current_mvt->test_right; 00534 } 00535 else 00536 { 00537 r = current_mvt->test_left; 00538 l = current_mvt->test_right; 00539 } 00540 t = current_mvt->test_top; 00541 b = current_mvt->test_bottom; 00542 }
Here is the caller graph for this function:
| bool Body::IsWalking | ( | ) | [inline] |
Definition at line 128 of file body.h.
00128 { return walk_events > 0 && current_mvt->type == "walk";};
Here is the caller graph for this function:

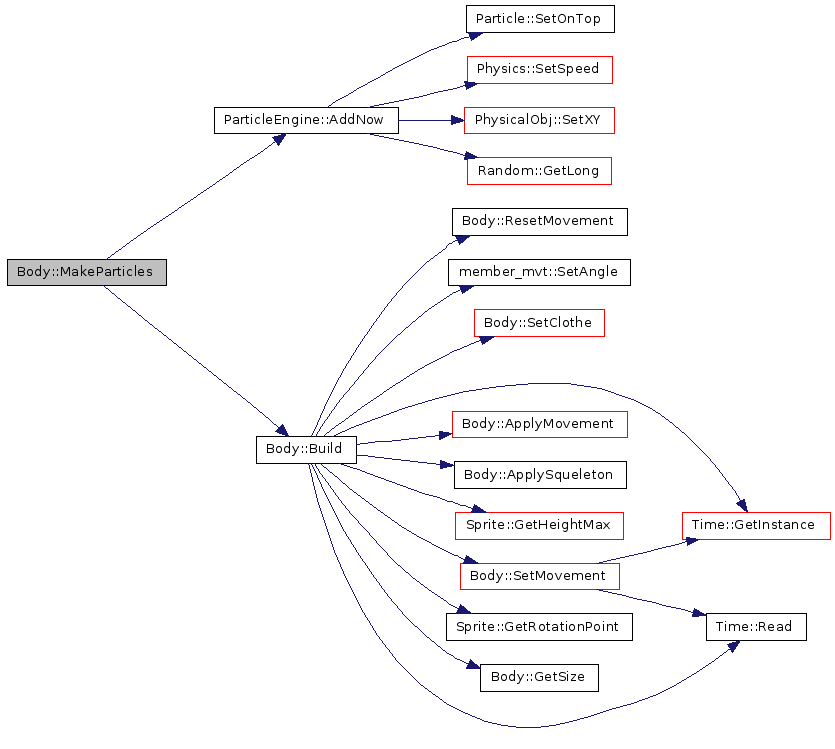
| void Body::MakeParticles | ( | const Point2i & | pos | ) |
Definition at line 600 of file body.cpp.
00601 { 00602 Build(); 00603 00604 for(int layer=0;layer < (int)current_clothe->layers.size() ;layer++) 00605 if(current_clothe->layers[layer]->type != "weapon") 00606 ParticleEngine::AddNow(new BodyMemberParticle(current_clothe->layers[layer]->spr, 00607 current_clothe->layers[layer]->GetPos()+pos)); 00608 }
Here is the call graph for this function:
Here is the caller graph for this function:

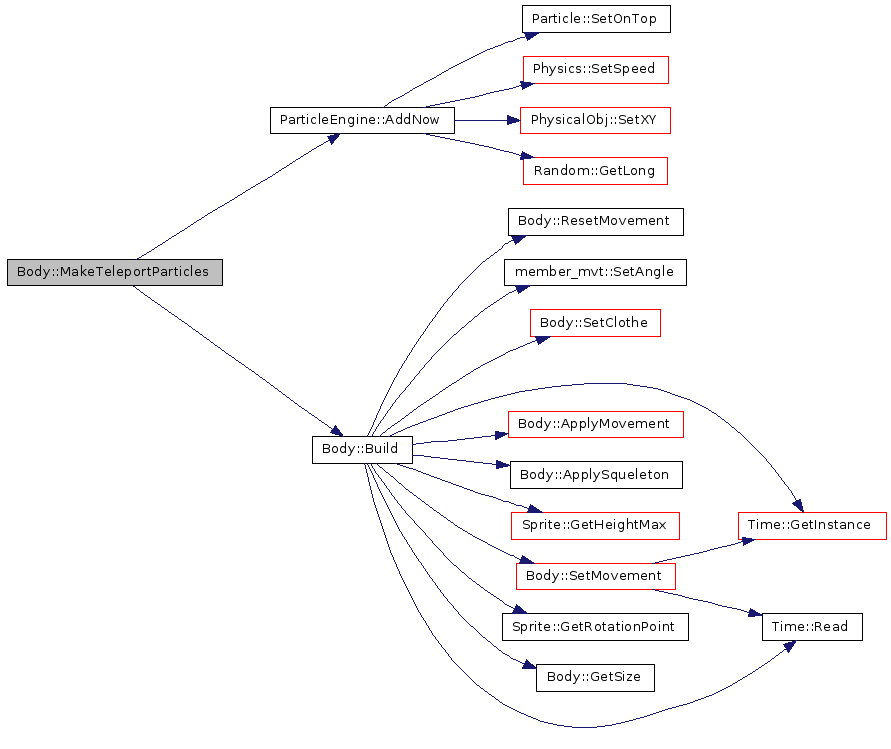
Definition at line 610 of file body.cpp.
00611 { 00612 Build(); 00613 00614 for(int layer=0;layer < (int)current_clothe->layers.size() ;layer++) 00615 if(current_clothe->layers[layer]->type != "weapon") 00616 { 00617 ParticleEngine::AddNow(new TeleportMemberParticle(current_clothe->layers[layer]->spr, 00618 current_clothe->layers[layer]->GetPos()+pos, 00619 current_clothe->layers[layer]->GetPos()+dst, 00620 int(direction))); 00621 } 00622 }
Here is the call graph for this function:
Here is the caller graph for this function:

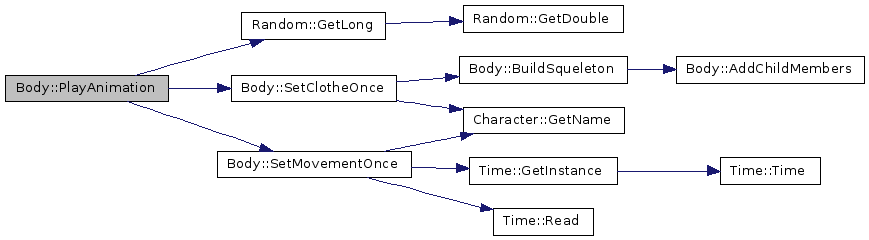
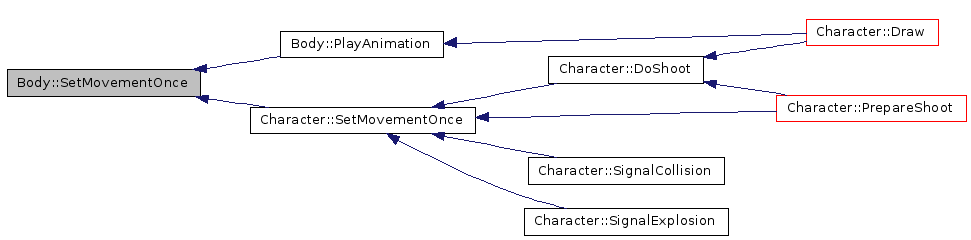
| void Body::PlayAnimation | ( | ) |
Definition at line 472 of file body.cpp.
00473 { 00474 std::ostringstream name; 00475 name << "animation" << randomObj.GetLong(0, animation_number - 1); 00476 SetClotheOnce(name.str()); 00477 SetMovementOnce(name.str()); 00478 }
Here is the call graph for this function:
Here is the caller graph for this function:

| void Body::ResetMovement | ( | ) | [private] |
Definition at line 207 of file body.cpp.
00208 { 00209 for(int layer=0;layer < (int)current_clothe->layers.size() ;layer++) 00210 current_clothe->layers[layer]->ResetMovement(); 00211 }
Here is the caller graph for this function:

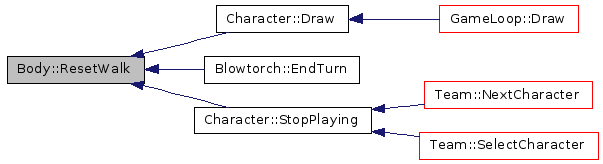
| void Body::ResetWalk | ( | ) |
Definition at line 578 of file body.cpp.
00579 { 00580 walk_events = 0; 00581 }
Here is the caller graph for this function:
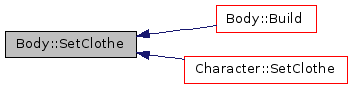
| void Body::SetClothe | ( | std::string | name | ) |
Definition at line 427 of file body.cpp.
00428 { 00429 MSG_DEBUG("body", " %s use clothe %s", owner->GetName().c_str(), name.c_str()); 00430 if(current_clothe && current_clothe->name == name) return; 00431 00432 if(clothes_lst.find(name) != clothes_lst.end()) 00433 { 00434 current_clothe = clothes_lst.find(name)->second; 00435 BuildSqueleton(); 00436 main_rotation_rad = 0; 00437 need_rebuild = true; 00438 } 00439 else 00440 MSG_DEBUG("body","Clothe not found"); 00441 00442 00443 play_once_clothe_sauv = NULL; 00444 00445 assert(current_clothe != NULL); 00446 }
Here is the call graph for this function:

Here is the caller graph for this function:
| void Body::SetClotheOnce | ( | std::string | name | ) |
Definition at line 480 of file body.cpp.
00481 { 00482 MSG_DEBUG("body", " %s use clothe %s once", owner->GetName().c_str(), name.c_str()); 00483 if(current_clothe && current_clothe->name == name) return; 00484 00485 if(clothes_lst.find(name) != clothes_lst.end()) 00486 { 00487 if(!play_once_clothe_sauv) 00488 play_once_clothe_sauv = current_clothe; 00489 current_clothe = clothes_lst.find(name)->second; 00490 BuildSqueleton(); 00491 main_rotation_rad = 0; 00492 need_rebuild = true; 00493 } 00494 else 00495 MSG_DEBUG("body","Clothe not found"); 00496 00497 assert(current_clothe != NULL); 00498 }
Here is the call graph for this function:

Here is the caller graph for this function:

| void Body::SetDirection | ( | Body::Direction_t | dir | ) |
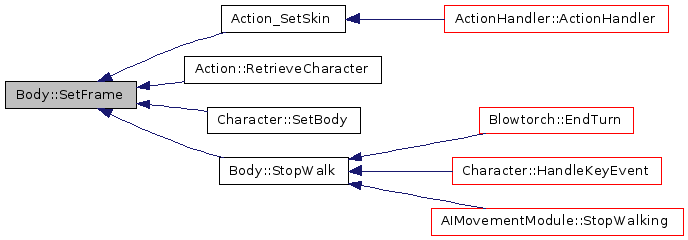
| void Body::SetFrame | ( | uint | no | ) |
Definition at line 593 of file body.cpp.
00594 { 00595 assert(no < current_mvt->frames.size()); 00596 current_frame = no; 00597 need_rebuild = true; 00598 }
Here is the caller graph for this function:
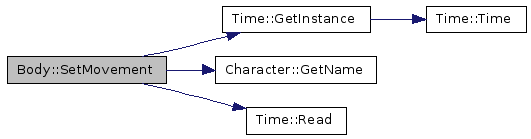
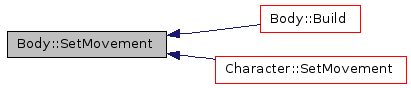
| void Body::SetMovement | ( | std::string | name | ) |
Definition at line 448 of file body.cpp.
00449 { 00450 MSG_DEBUG("body", " %s use movement %s", owner->GetName().c_str(), name.c_str()); 00451 if(current_mvt && current_mvt->type == name) return; 00452 00453 // Dirty trick to get the "black" movement to be played fully 00454 if(current_clothe && current_clothe->name == "black") return; 00455 00456 if(mvt_lst.find(name) != mvt_lst.end()) 00457 { 00458 current_mvt = mvt_lst.find(name)->second; 00459 current_frame = 0; 00460 last_refresh = Time::GetInstance()->Read(); 00461 main_rotation_rad = 0; 00462 need_rebuild = true; 00463 } 00464 else 00465 MSG_DEBUG("body","Movement not found"); 00466 00467 play_once_mvt_sauv = NULL; 00468 00469 assert(current_mvt != NULL); 00470 }
Here is the call graph for this function:
Here is the caller graph for this function:
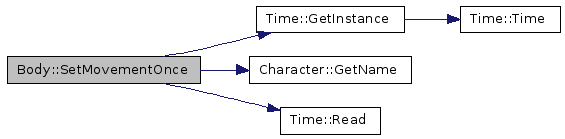
| void Body::SetMovementOnce | ( | std::string | name | ) |
Definition at line 500 of file body.cpp.
00501 { 00502 MSG_DEBUG("body", " %s use movement %s once", owner->GetName().c_str(), name.c_str()); 00503 if(current_mvt && current_mvt->type == name) return; 00504 00505 // Dirty trick to get the "black" movement to be played fully 00506 if(current_clothe && current_clothe->name == "black" && name != "black") return; 00507 00508 if(mvt_lst.find(name) != mvt_lst.end()) 00509 { 00510 if(!play_once_mvt_sauv) 00511 { 00512 play_once_mvt_sauv = current_mvt; 00513 play_once_frame_sauv = current_frame; 00514 } 00515 00516 current_mvt = mvt_lst.find(name)->second; 00517 current_frame = 0; 00518 last_refresh = Time::GetInstance()->Read(); 00519 main_rotation_rad = 0; 00520 need_rebuild = true; 00521 } 00522 else 00523 MSG_DEBUG("body","Movement not found"); 00524 00525 assert(current_mvt != NULL); 00526 }
Here is the call graph for this function:
Here is the caller graph for this function:
| void Body::SetOwner | ( | const Character * | belonger | ) | [inline] |
| void Body::SetRotation | ( | double | angle | ) |
Definition at line 624 of file body.cpp.
00625 { 00626 MSG_DEBUG("body", "%s -> new angle: %i", owner->GetName().c_str(), angle); 00627 main_rotation_rad = angle; 00628 need_rebuild = true; 00629 }
Here is the call graph for this function:

Here is the caller graph for this function:

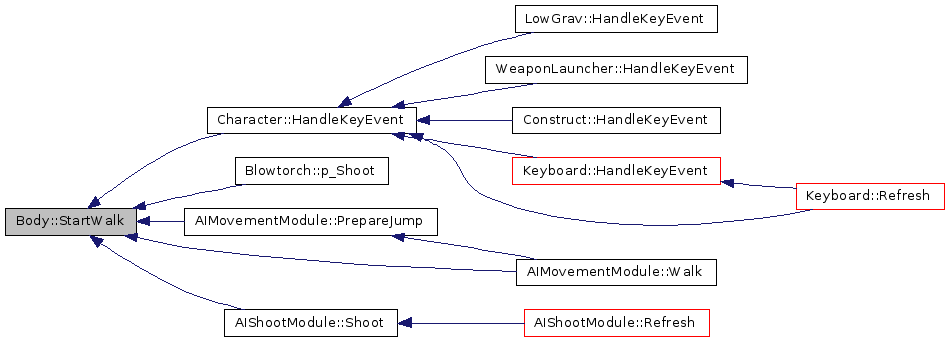
| void Body::StartWalk | ( | ) |
Definition at line 559 of file body.cpp.
00560 { 00561 // walk events happens when the player hits the left/right key 00562 // counting how much they are pressed allow to get skin walking 00563 // if the key was hit while the character was jumping or using an other 00564 // animation than the walk animation 00565 walk_events++; 00566 if(walk_events == 1) 00567 last_refresh = Time::GetInstance()->Read(); 00568 }
Here is the call graph for this function:

Here is the caller graph for this function:
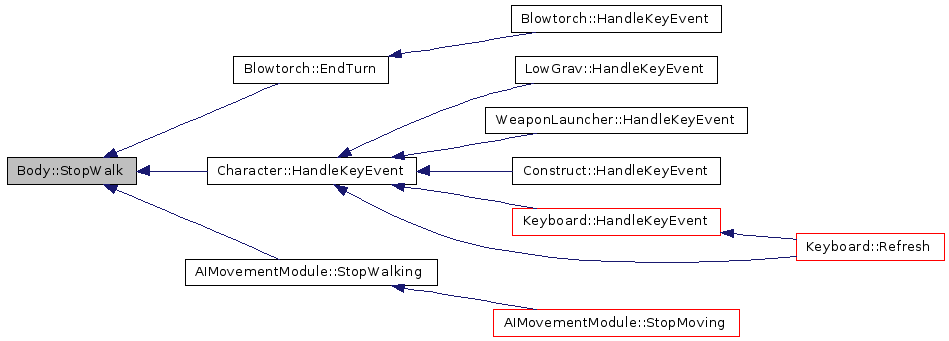
| void Body::StopWalk | ( | ) |
Definition at line 570 of file body.cpp.
00571 { 00572 if(walk_events > 0) 00573 walk_events--; 00574 if(current_mvt->type == "walk") 00575 SetFrame(0); 00576 }
Here is the call graph for this function:

Here is the caller graph for this function:
int Body::animation_number [private] |
std::map<std::string, Clothe*> Body::clothes_lst [private] |
Clothe* Body::current_clothe [private] |
uint Body::current_frame [private] |
Movement* Body::current_mvt [private] |
Body::Direction_t Body::direction [private] |
uint Body::last_refresh [private] |
double Body::main_rotation_rad [private] |
std::map<std::string, Member*> Body::members_lst [private] |
std::map<std::string, Movement*> Body::mvt_lst [private] |
bool Body::need_rebuild [private] |
const Character* Body::owner [private] |
Clothe* Body::play_once_clothe_sauv [private] |
uint Body::play_once_frame_sauv [private] |
Movement* Body::play_once_mvt_sauv [private] |
std::vector<junction> Body::squel_lst [private] |
int Body::walk_events [private] |
Member* Body::weapon_member [private] |
Point2i Body::weapon_pos [private] |
 1.4.7
1.4.7